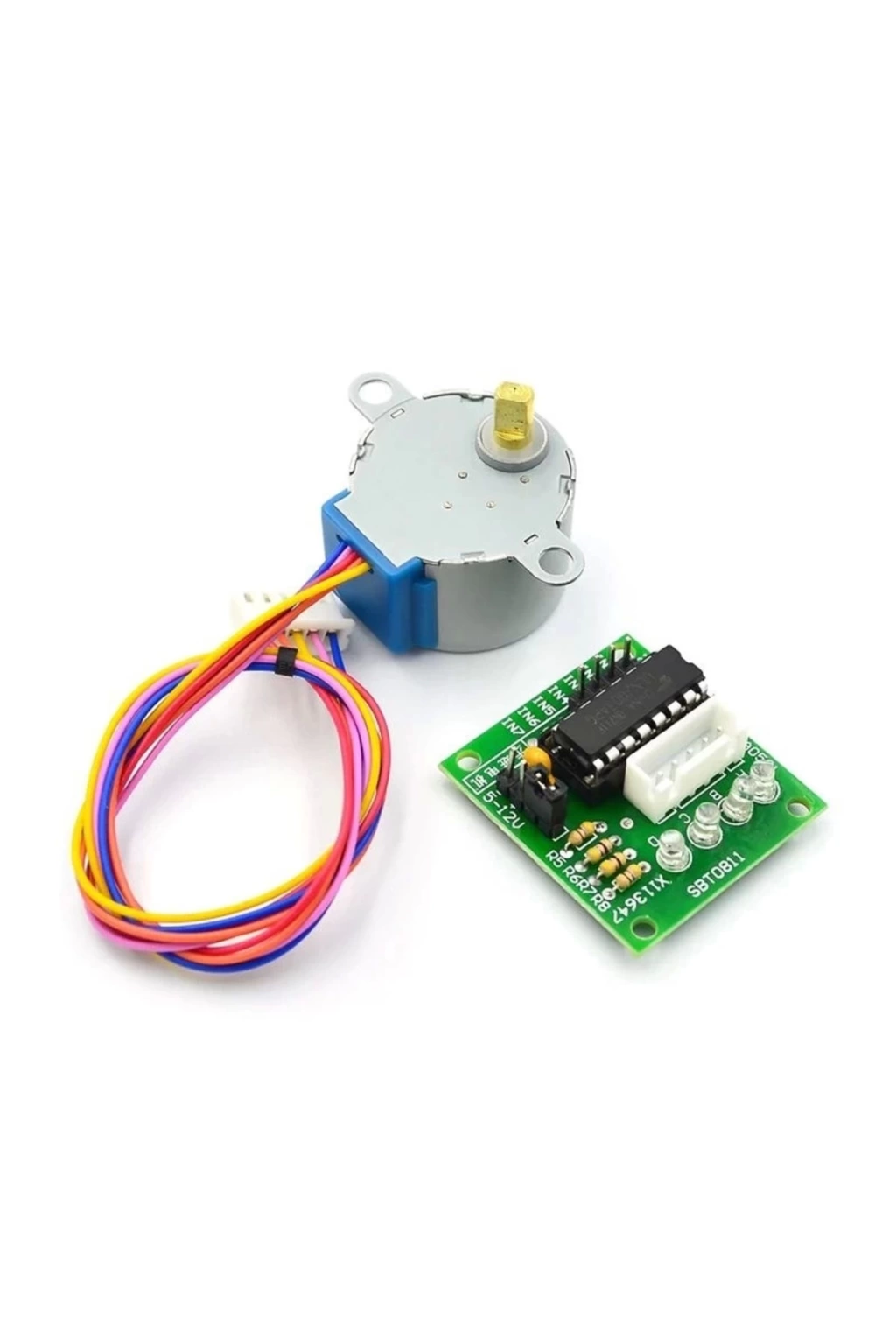
5V 28BYJ48 Step Motor + ULN2003A Sürücü Kartı
4096 Adım 4 Faz Robot Arduino Hassas Pozisyon Otomasyon Cnc Kontrol Hobi
28 BYJ-48 5V step motor ve sürücü kartıdır. Hassas hareket kontrolü ve geniş uygulama yelpazesiyle öne çıkar. Hobi projelerinden endüstriyel otomasyona kadar pek çok alanda ideal çözümler sunar. Uln2803a sürücü kartı üzerinde 4 led ve 4 kontrol pini bulunmaktadır. Bu pinler sayesinde step motorun sürülmesini, Arduino veya herhangi bir mikrodenetleyeci ile gerçekleştirebilirsiniz.
Dahili redüktör sayesinde, içteki 5.625° adım açısı 1/64 oranıyla desteklenerek çıkış milinde 4096 adım/dönüş hassasiyet sağlar. Uln2803a sürücü kartı, 4 LED ve 4 kontrol pini aracılığıyla motorun durumunu göstermekle kalmaz; Arduino ve diğer mikrodenetleyicilerle entegrasyonu da son derece kolaylaştırır.
Hassas Pozisyon Kontrolü: 4096 adım/dönüş hassasiyeti sayesinde robotik, CNC ve otomasyon projelerinde üstün performans.
Düşük Güç Tüketimi & Sessiz Çalışma: Yüksek adım doğruluğu, düşük titreşim ve minimum gürültü ile verimli çalışma sağlar.
Kolay Entegrasyon: Arduino ve benzeri mikrodenetleyici platformlarıyla uyumlu; ULN2003A sürücü kartı sayesinde kontrol devreleri hızlıca oluşturulabilir.
Step Motor Özellikleri
5V 28BYJ48 Step Motor + ULN2003A Sürücü Kartı
Çalışma voltajı: DC 5V
Faz sayısı: 4
Adım açısı 5.625 Derece
Redüktör Oranı: 1/64
Çıkış tekerleği için 4096 adım/dönüş
Torku: 300gf·cm
DC direnç: 130ohm
Frekans: 100 Hz
Çalışma sıcaklığı: -20C / 75C
Boyutlar: 28mm çap x 19mm yükseklik
Mil uzunluğu: 10mm
Montaj delik mesafesi 35mm
Ağırlık: 35gr
Pin açıklaması
Kırmızı: 5V
Turuncu: 1B
Pembe: 1A
Sarı: 2A
Mavi: 2B
Paket içeriği
1 Adet 5V 28BYJ48 Step Motor
1 Adet Uln2803a modül kartı
Ek Bilgi: 28BYJ-48 step motorunun tipik çekiş (pull-in) torku yaklaşık 300 gf•cm (yaklaşık 0.03 N•m) civarındadır. Bu, örneğin:
1 cm kol kullanıldığında, teorik olarak motor yaklaşık 300 gram yükü kaldırabilir.
2 cm kol kullanıldığında, kaldırılabilecek yük yarıya inerek yaklaşık 150 gram olur.
Not: Bu değerler ideal koşullar altında hesaplanmış olup, gerçek uygulamalarda mekanik verimlilik, sistemdeki sürtünme ve diğer kayıplar nedeniyle elde edilecek performans değişiklik gösterebilir.